
四元数(Quaternion)
最近在做的工作是深度点云, 在学习计算机图形学和刚体运动的过程中接触到四元数, 本身是一个比较抽象的概念, 我们都知道复数可以画成一个2维平面, 复数的乘法表示2维的拉伸和旋转, 那么四元数呢? 下面会一步步来学习四元数是如何表示三维旋转的.
1. 复数(Complex Number)
1.1 定义
在介绍四元数之前, 先来了解复数和2D旋转之间的关系, 由于不是本文重点所以就简单介绍一下.
任意一个复数$\mathcal z \in \mathbb C$都可以表示成 $\mathcal z =\mathcal a +\mathcal b \mathcal i$ 的形式, 其中$\mathcal a \mathcal b \in \mathbb R$而且$i^2=-1$. 其中$\mathcal a$和$\mathcal b$就是这个复数的实部(Real Part)和虚部(Imagirary Part).
表示为向量形式就是:
如此一来, 在复平面上也就形成一条直线.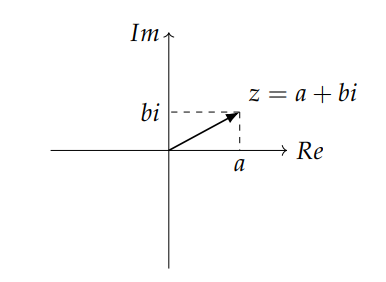
1.2 复数乘法
考虑两个复数$\mathcal z_1 = \mathcal a + \mathcal b \mathcal i$和$\mathcal z_2 = \mathcal c +\mathcal d \mathcal i$, 利用分配律直接相乘:
可以发现, 复数相乘其实就是矩阵相乘:
需要注意的是, 尽管形式上等价于矩阵相乘, 但是交换$\mathcal z_1 \mathcal z_2$的位置会得到相同的计算结果, 这里就不写了.
1.2 复数模长(Magnitude)与共轭(Conjugate)
还是$\mathcal z = \mathcal a + \mathcal b \mathcal i$, 它的模长也就表示为
它的共轭表示为
我们发现只需要翻转虚部就可以得到共轭, 并且模长可以通过共轭乘积得到
大家可以自己算一下$z\bar z$, 简单的分配律即可, 这里就不算了.
1.3 复数与2D旋转
前面说过复数相乘可以表示为$\left[ \begin{matrix} a & -b \ b & a \end{matrix} \right]$矩阵做出变换, 对该矩阵变形:
每个元素除以模长, 观察复平面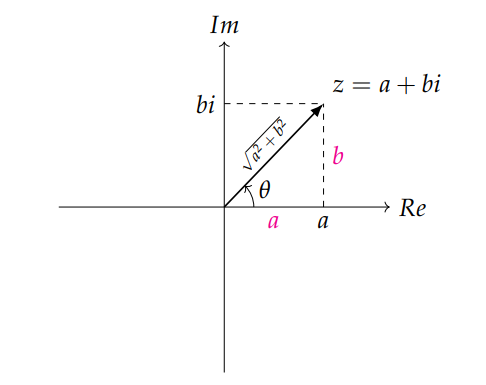
会发现$\Vert z \Vert$正是复数$z$与坐标轴所形成三角形的斜边长, 而$a, b$正是三角形的两条边, 记录夹角为$\theta$, 那么可以得到$\cos({\theta}) = \frac{a}{\sqrt{a^2+b^2}}$并且$\sin({\theta})=\frac{b}{\sqrt{a^2+b^2}}$, OK, 那么接下来继续对矩阵变形.
变形完之后, 左边就是缩放矩阵, 右边就是我们常说的旋转矩阵了. 关于旋转矩阵的内容就不多写了.
2. 三维空间中的旋转
先来简单说说三维空间的旋转, 三维空间的旋转有很多表示方法, 其中欧拉角是比较常见并且很好理解的方式, 也有许多问题, 比如Gimbal Lock, 并且依赖三个坐标轴的选定, 有兴趣可以找些相关资料看, 这里说一下轴角式(Axis-angle).
假设我们有一个经过原点的(如果旋转轴不经过原点我们可以先将旋转轴平移到原点, 进行旋转, 再平移回原处)旋转轴$\mathbf u=(x,y,z)^T$, 有一个向量$\mathbf v$, 沿着这个旋转轴旋转$\theta$度, 变换到$\mathbf v^′$: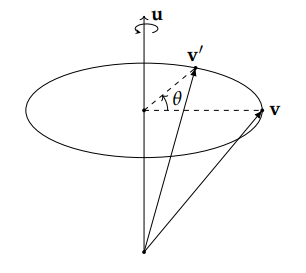
遵循右手定则, 右手拇指指向$\mathbf u$正向, 弯曲的手指为旋转正向.
在轴角式中, 旋转的定义需要四个变量: $x,y,z,\theta$, 换句话说, 我们具有四个自由度(Degree of Freedom), 而欧拉角只有三个自由度, 然而实际上三个自由度确实能够得到一个旋转, 那么为什么这里多出一个自由度?
事实上, 在定于旋转轴$x,y,z$的同时, 也就定义了$\mathbf u$的模长, 平时所说的绕着一个向量$\mathbf u$做旋转, 其实是指绕着$\mathbf u$所指的方向进行旋转. 我们知道向量具有方向和大小两个性质, 在旋转中大小并不重要, 这应该很好理解, 绕着$\mathbf u_1=(0, 0, 1)^T$和绕着$\mathbf u_2=(0, 0, 3)^T$是一样的, 虽然这两个向量的长度不同, 但它们指向通一个方向(也就为旋转指明了方向).
在三维空间中, 定义方向只需要两个量, 举个例子, 地球的经纬度, 而如果需要某个方位上的特定一点, 还需要一个自由度, 也就是海拔.
为了消除模长这个自由度, 规定旋转轴$\mathbf u$的模长为1, 也就是$\Vert \mathbf u \Vert=\sqrt{x^2+y^2+z^2}=1$, 这样一来只要给出$\mathbf u$的任意两个坐标, 就可以求出第三个坐标. 当然, 也可以不规定模长为1, 但是为了后续的许多推倒便利, 规定为1是有好处的, 这也是数学和物理中对方向定义的惯性.
2.1 旋转的分解
在进行旋转之前, 先对旋转进行分解. 首先将$\mathbf v$分解为平行于旋转轴$\mathbf u$和正交与旋转轴$\mathbf u$的两个分量, 记做$\mathbf v_\Vert$和$\mathbf v_\bot$.
那么就有以下等式:
分别旋转两个分量, 得到$\mathbf v_\Vert^′$和$\mathbf v_\bot^′$, 同样:
事实上$\mathbf v_\Vert$就是就是$\mathbf v$在$\mathbf u$上的正交投影 (Orthogonal Projection):
由于(1), 可以得到$\mathbf v_\bot = \mathbf v - \mathbf v_\Vert = \mathbf u - (\mathbf u · \mathbf v) \mathbf u$, 至此就能知道如何根据得到的$\mathbf u, \mathbf v$得到分量了, 要旋转$\mathbf u, \mathbf v$, 需要对分量进行旋转.
2.2 $\mathbf v_\Vert$的旋转
从图里可以知道, $\mathbf v_\Vert$根本没有被旋转, 因此旋转$\theta$度后有$\mathbf v_\Vert = \mathbf v_\Vert^′$.
2.3 $\mathbf v_\bot$的旋转
$\mathbf v_\bot$与$\mathbf u$正交, 旋转可以看作是平面内的一次旋转, 现在3D旋转被转换为2D旋转, 在这个平面上我们只有一个向量$\mathbf v_\bot$, 用它来表示一个旋转是不够的, 还需要构造一个同时正交于$\mathbf u$和$\mathbf v_\bot$的向量$\mathbf w$, 通过叉乘来得到:
这个新的向量$\mathbf w$指向$\mathbf v_\bot$逆时针(正向)旋转$\frac {π}{2}$后的方向, 并且也处于正交平面内. 由$\Vert \mathbf u \Vert = 1$可知:
也就是说, $\mathbf w$和$\mathbf v_\bot$的模长是相同的, 所以, $\mathbf w$也位于圆上. 有了这个新的向量, 就相当于我们在新的平面内有了两个坐标轴. 现在可以把$\mathbf v_\bot^′$投影到$\mathbf w$和$\mathbf v_\bot$上, 将其分解为$\mathbf v_v^′$和$\mathbf v_w^′$. 利用一些三角形的知识, 我们可以得到:
因此, 旋转公式为:
2.4 $\mathbf v$的旋转
所以总结起来就是:
将$\mathbf v_\Vert = (\mathbf u · \mathbf v) \mathbf u$和$\mathbf v_\bot=\mathbf v - (\mathbf u · \mathbf v) \mathbf u$代入(3):
公式(4)就表示了3D空间中任意一个$\mathbf v$沿着单位向量$\mathbf u$旋转$\theta$角度后得到的$\mathbf v^′$, 这条公式将会与四元数有所联系.
3. 四元数
至此将会正式学习四元数, 其定义和复数非常类似, 唯一的区别在于四元数有三个虚部. 所有四元数$\mathcal q \in \mathbb H$都这样表示:
向量形式:
此外, 还可以将实部虚部分开, 用三维向量表示虚部:
其他内容后续再写…